





PIX4Dcatch
ทำไม PIX4Dcatch คือคำตอบที่ดีที่สุด?
การสแกน 3 มิติพร้อมพิกัดภูมิศาสตร์ (Georeferenced)
PIX4Dcatch ช่วยคุณสร้างโมเดล 3 มิติที่ละเอียดและระบุพิกัดได้อย่างแม่นยำ ด้วยเทคโนโลยี Photogrammetry และ LiDAR บนสมาร์ทโฟนของคุณ
ทางเลือกการประมวลผลที่ยืดหยุ่นและหลากหลาย
ตอบโจทย์ทุกการทำงานด้วยโซลูชันการประมวลผลที่ยืดหยุ่น ไม่ว่าจะอัปโหลดตรงไปยัง PIX4Dcloud เพื่อการประมวลผลที่ง่ายและสะดวด หรือจะส่งออกไปยัง PIX4Dmatic เพื่อการควบคุมและปรับแต่งขั้นสูง

รองรับการเชื่อมต่อระบบ RTK
ให้โมเดล 3 มิติของคุณมีความแม่นยำสัมบูรณ์ในระดับเซนติเมตร ด้วยการทำงานร่วมกันอย่างลงตัวของ PIX4Dcatch และ RTK

นวัตกรรมฟีเจอร์ AR เพื่อการทำงานที่มีประสิทธิภาพ
Use AR to easily detect GCPs and see as-built and CAD design overlays for construction analysis.

ค้นพบทุกความสามารถของ PIX4Dcatch ได้แล้ววันนี้!
Download the feature list

PIX4Dcatch
แอพพลิเคชั่นที่สามารถดาวน์โหลดได้ฟรีบนมือถือและแท็บเล็ตในระบบ iOS, Android เพื่อเปลี่ยนอุปกรณ์ของคุณให้เป็น Laser Scanner โดยทำการเก็บข้อมูลวัตถุ พื้นที่ ในรูปแบบ As-is เพื่อนำไปสร้างเป็นข้อมูลสามมิติโดยข้อมูลที่ได้เป็นข้อมูลภาพถ่าย (Photogrametry) และ Pointcloud ทันที (สำหรับอุปกรณ์ที่มี sensor LiDAR)
คุณสมบัติที่โดดเด่น
- Easy to use : สามารถใช้งานผ่านโทรศัพท์มือถือและแทบเล็ท เพียงทำการเดินรอบวัตถุที่ต้องการเก็บข้อมูล และดูข้อมูลที่ทำการสแกนได้แบบ Realtime ในรูปแบบสามมิติ
- Fast and reliable : Application จะทำการบันทึกตำแหน่งปัจจุบันของคุณ และทำการส่งออกข้อมูล 3D ที่มีการปรับขนาดและอ้างอิงทางภูมิศาสตร์ในรูปแบบ 3 มิติ
- Everything done with Pix4D products : สามารถทำการประมวลผลข้อมูล และส่งออกข้อมูลที่ทำการเก็บไว้ไปยังผลิตภัณฑ์ของ PIX4D ผ่าน PIX4Dcloud เพื่อแบ่งปันข้อมูลได้ทันที
PIX4D
Work Process
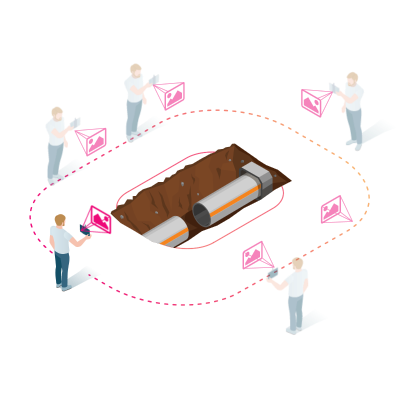
Capture ground data
ใช้ PIX4Dcatch บนอุปกรณ์ของคุณในการเก็บข้อมูลโดยการเดินรอบพื้นที่ที่ต้องการเก็บข้อมูล สามมิติโดยโปรแกรมจะทำการบันทึกข้อมูลโดยอัตโนมัติ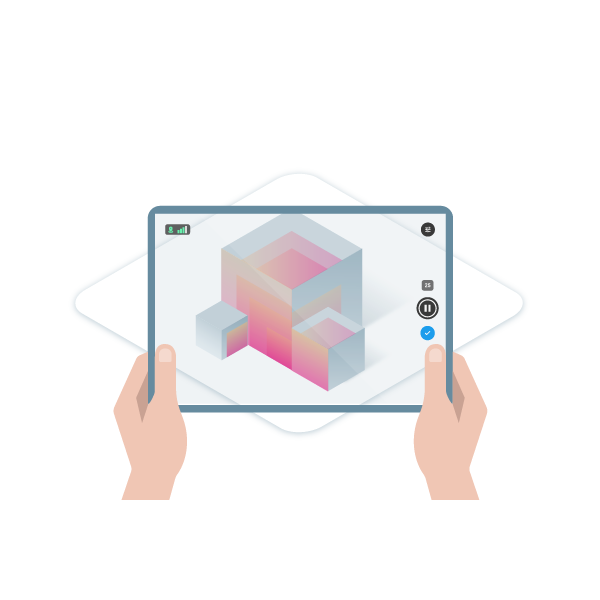
Ensure completeness
เมื่อเก็บข้อมูลครอบคลุมพื้นที่แล้ว โปรแกรมจะทำการสร้างภาพพื้นผิว 3D mesh รูปแบบ Photogrametry เพื่อแสดงเป็น Pointcloud และสำหรับ Apple iPad Pro และ Apple iPhone Pro ที่รองรับ Sensor LiDAR จะสามารถแสดงผลข้อมูล Pointcloud ได้โดยตรง
Pause and restart
คุณสามารถหยุด หรือสแกนต่อเนื่องได้ทันทีที่ต้องการ โดยสามารถตรวจสอบพื้นที่ที่สแกนว่ามีความครอบคลุมหรือครบถ้วนหรือยังได้จากหน้าจออุปกรณ์ของคุณ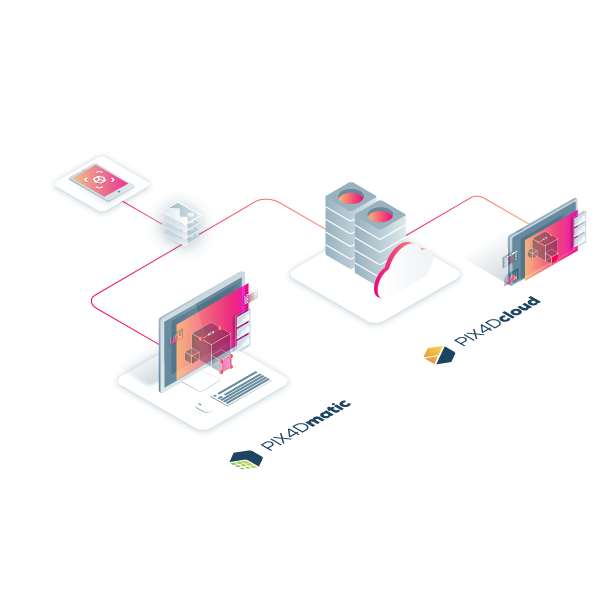
Export and process
ทำการอัพโหลดภาพถ่าย และ Pointcloud ของคุณไปยัง PIX4Dcloud เพื่อประมวลผล หรือส่งออกไปยังผลิตภัณฑ์อื่น ๆ ของ PIX4D




RTK rover
PIX4Dcatch and the RTK survey-grade accuracy
สามารถรับสัญญาณดาวเทียมจากดาวเทียม หลักๆได้ เช่น GPS,GLONASS,Galileo ตัวเครื่องจะเชื่อมต่อกับระบบ NTRIP ในระหว่างการเก็บข้อมูลและสำรวจข้อมูลภาคพื้นดิน เพื่อติดแท็กตำแหน่งรูปภาพที่เก็บรวบรวมด้วย PIX4Dcatch แบบเรียลไทม์ ซึ่งช่วยให้ข้อมูลมีความแม่นยำระดับเซนติเมตร โดยตัวนี้จะเชื่อมต่อกับโทรศัพท์มือถือผ่านทาง Bluetooth ทำให้เราสามารถเก็บข้อมูลเพื่อไปทำ Digital twin ได้รวดเร็วและแม่นยำมากขึ้น
- • มีขั้นตอนการทำงานที่ง่ายตั้งแต่ต้นจนจบ การแปลงข้อมูลที่เก็บได้ให้ไปอยู่ในรูปแบบข้อมูลดิจิทัลได้อย่างง่ายดายด้วยซอฟต์แวร์ PIX4D ที่สามารถวัดและสร้างข้อมูล ข้อมูลเส้น ข้อมูล Polygon
- • RTK positioning rover for 3D scanningRTK rover จับคู่กับ PIX4Dcatch เพื่อระบุตำแหน่งของรูปภาพ ของการสแกน 3 มิติแบบเรียลไทม์โดยใช้บริการผ่านทางระบบ NTRIP
- • ปรับปรุงข้อมูลที่เก็บด้วยมือถือ RTK Rover เชื่อมต่อกับช่องรับสัญญาณ (รวมถึงกลุ่มดาวเทียมหลักๆทั้งหมด เช่น GPS, GLONASS, Galileo ฯลฯ) ซึ่งส่งผลให้เกิดการ fix ภายในเวลาไม่ถึง 5 วินาที
- • ลดขั้นตอนการทำงานที่ซับซ้อน มี Workflow การทำงานที่ไม่ยุ่งยาก
- • สามารถทำงานได้อย่างสมบูรณ์และแม่นยำได้ในมือคุณRTK Rover, สมาร์ทโฟน, PIX4Dcatch และ PIX4Dcloud โซลูชันแบบครบวงจรที่ให้การวัดมีความแม่นยำระดับเซนติเมตร
- • มีโครงสร้างที่สามารถใช้งานได้ง่ายสำหรับทุกคนที่ต้องการเก็บข้อมูลหรือสแกน 3 มิติที่แม่นยำ เพื่อสร้างข้อมูล Digital twin ได้ง่ายและรวดเร็วด้วยมือถือและซอฟต์แวร์ที่อยู่บนมือถือ
PIX4Dcatch + GNSS Solution ที่ทำให้งานเก็บข้อมูลสามมิติของคุณถูกต้องแม่นยำและง่ายกว่าที่คิด
Download Brochure
ดาวน์โหลดPIX4Dcatch
ค้นหาโซลูชันที่ใช่และตอบโจทย์งานของคุณด้วย PIX4Dcatch
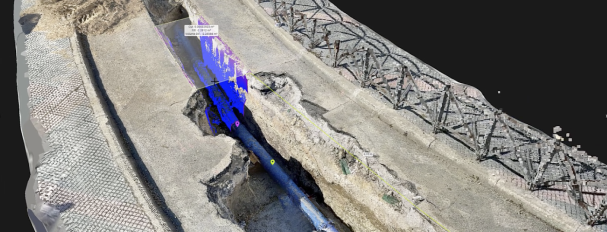
งานระบบสาธารณูปโภคและแผนที่ใต้ดิน
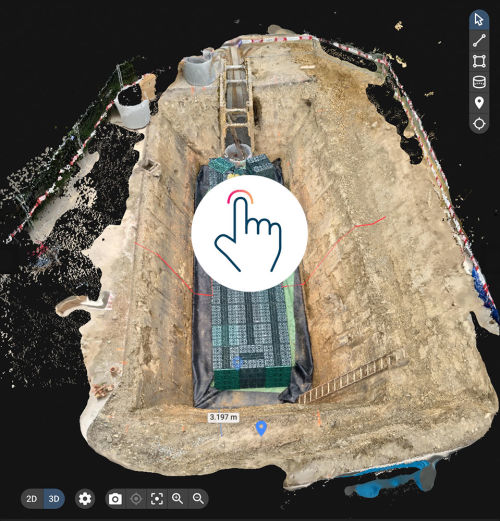
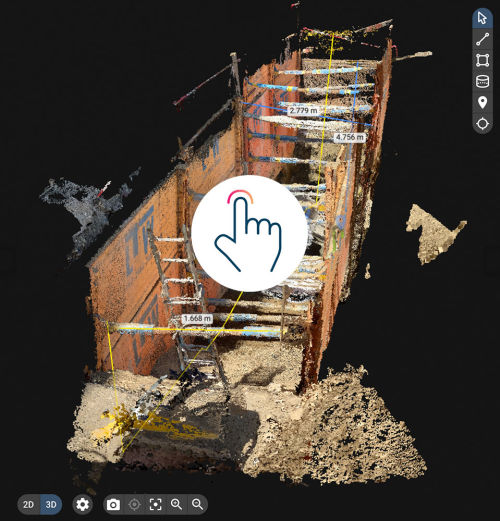
สแกนร่องขุดได้อย่างรวดเร็ว เพื่อทำเอกสารบันทึกตำแหน่งระบบสาธารณูปโภคใต้ดินเรียกดูภาพจำลองด้วย AR ได้อย่างแม่นยำ แม้จะฝังกลบหน้างานไปแล้ว
ประหยัดเวลาทำงาน และช่วยลดต้นทุนได้อย่างมีประสิทธิภาพ
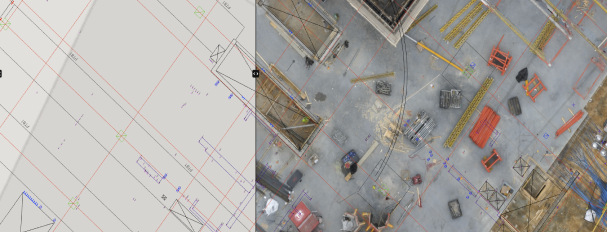
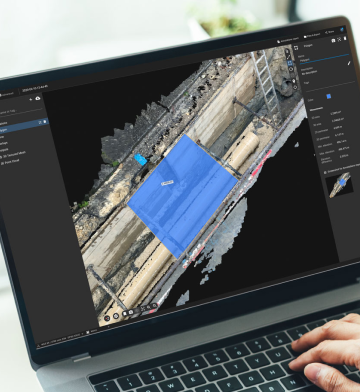
การตรวจสอบงานก่อสร้างและงานดิน
แสดงภาพซ้อนทับ (Overlay) ร่วมกับแบบแปลนไฟล์ DXF, IFC หรือ SHPวัดและเปรียบเทียบปริมาตรงานดิน (Volume) ได้อย่างแม่นยำ
ลดต้นทุนการดำเนินงาน พร้อมเร่งรัดให้โครงการเสร็จไวขึ้น
งานวิศวกรรมโยธาและการตรวจสอบหน้างาน
แสดงไฟล์ CAD ซ้อนทับบนพื้นที่จริง เพื่อเปรียบเทียบความถูกต้องหน้างานอัปโหลดข้อมูลขึ้น Cloud เพื่อการทำงานร่วมกันของทีมได้อย่างไร้รอยต่อ
เร่งกระบวนการตรวจสอบให้รวดเร็วยิ่งขึ้น ช่วยให้โครงการดำเนินไปตามแผนงาน

งานพิสูจน์หลักฐานและบันทึกที่เกิดเหตุ
ผสานข้อมูลจากโดรนและสมาร์ทโฟน เพื่อสร้างโมเดล 3 มิติที่สมบูรณ์แบบขั้นตอนการทำงานที่ปลอดภัย ทำงานแบบออฟไลน์ได้ และใช้งานง่าย
จัดทำเอกสารบันทึกรายละเอียดสถานที่เกิดเหตุอย่างครบถ้วนและแม่นยำ

งานสำรวจรังวัดที่ดิน
เปลี่ยนงานสำรวจให้เป็นเรื่องง่าย ด้วยหน้าต่างโปรแกรม (UI) ที่เป็นมิตรต่อผู้ใช้งานทำงานร่วมกับ PIX4Dmatic และ PIX4Dcloud ได้อย่างไร้รอยต่อ
ประมวลผลข้อมูลและแชร์รายงานผลการทำงานได้อย่างสะดวกรวดเร็ว
PIX4Dcatch
demo projects
การตรวจสอบงานเทคอนกรีตด้วย PIX4Dcatch
ทำแผนที่ใต้ดินอย่างแม่นยำด้วย PIX4Dcatch
GET SPECIAL OFFER !!!
รับราคาพิเศษ สำหรับ License แบบซื้อขาดและแบบรายปี กรอกแบบฟอร์มเพื่อขอใบเสนอราคาได้เลย
ขอใบเสนอราคาพิเศษPIX4Dcatch
Use Case

Laying pipelines with the PIX4Dcatch RTK workflow
ขั้นตอนการทำงานของ PIX4Dcatch RTK ช่วยประหยัดเวลาและเพิ่มประสิทธิภาพการทำงานสำหรับ HSC Pipeline Engineering ในสิงคโปร์ โดยใช้ PIX4Dcatch and RTK rover เก็บข้อมูลทางกายภาพก่อนที่จะมีการออกแบบและวางท่อในเขตเมืองและ ใช้ PIX4Dcloud ในการประมวลผลข้อมูลเพื่อสร้างข้อมูลโมเดล 3 มิติ"การรวมกันของ PIX4Dcatch และ GNSS RTK Rover และ PIX4Dcloud ช่วยให้เราสามารถสร้างการสแกน 3D คุณภาพสูงที่มีความแม่นยำเชิงพื้นที่และแชร์กับผู้มีร่วมได้ง่าย ไม่เพียงแต่ขั้นตอนการทำงานจะใช้งานง่ายและราบรื่นเท่านั้น แต่ยังมีค่าใช้จ่ายเพียงเล็กน้อยจาก โซลูชันอื่นๆ ที่มีอยู่ในตลาด" - กรรมการผู้จัดการ คุณเชน ซือ

Damage assessment with the PIX4Dcatch RTK workflow
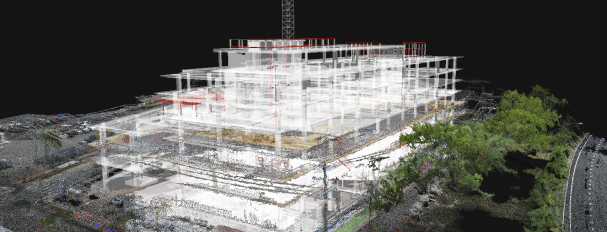
สภาพของอาคารและระดับความเสียหายจากแผ่นดินไหวได้รับการประเมินอย่างรวดเร็ว โครงการทั้งหมดตั้งแต่ต้นจนจบแล้วเสร็จภายในเวลาประมาณ 25 นาที ทีมงานพบว่าอินเทอร์เฟซของซอฟต์แวร์ Pix4D ใช้งานง่ายและเข้าใจง่าย พวกเขาเลือกใช้ Pix4D เนื่องจากความเร็ว ประสิทธิภาพ และผลลัพธ์คุณภาพสูงOutput formats: .las, .laz

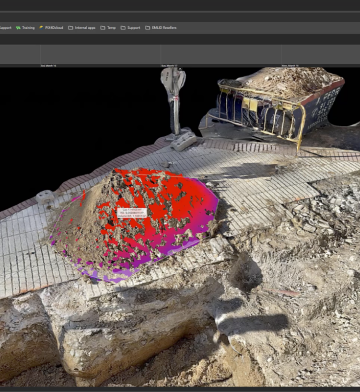
Which is best? The RTK or the P1 and DJI Matrice 300
เก็บข้อมูลจากโดรน M300 ที่ติดกล้อง P1 และตัว RTK ที่เชื่อมต่อกับ iPhone 12 Promax และ Xiaomi 11 ที่ไม่ได้ติด RTK และทำจุด CP นำข้อมูลมาเปรียบเทียบกัน ข้อผิดพลาดกำลังสอง RMSE สำหรับการวัดโดรนและRTK อยู่ที่ +- 2 ซม. ในแกน X, Y และ Z ซึ่งหมายความว่าการวัดที่ทำขึ้นจากชุดข้อมูลเหล่านี้เป็นไปตามมาตรฐานกลุ่ม 1 ที่กำหนดในกฎหมายโปแลนด์ เพื่อเป็นข้อมูลอ้างอิง บูโร เวอริทัส ได้รับรอง RTK สำหรับการวัดคลาส A (แม่นยำไม่เกิน 5 เซนติเมตร)Xiaomi ที่ไม่มี RTK มีความแม่นยำภายใน 5 เซนติเมตร เมื่อทำการวัดวัตถุที่อยู่ห่างออกไป 2 เมตร แต่สามารถเพิ่มความแม่นยำได้ด้วย GCP หรือจุดตรวจสอบ ผลลัพธ์เหล่านี้เน้นย้ำถึงขั้นตอนการทำงานที่ตรงไปตรงมาของ RTK เนื่องจากมีความแม่นยำมากกว่า และไม่ต้องใช้ขั้นตอนเพิ่มเติมใดๆ เพื่อรับรองความถูกต้อง ซึ่งแตกต่างจาก Xiamoi ที่ต้องมี GCP
