

OmniSLAM R8
Surveying & Mapping|Rotating Single Lidar
OmniSLAM เป็นระบบ SLAM (Simultaneous Localization and Mapping) ที่ออกแบบมาเพื่อการสำรวจและทำแผนที่ 3D ด้วยความแม่นยำสูง โดยใช้เทคโนโลยี LiDAR และกล้องหลายตัว เหมาะสำหรับงานสำรวจภูมิประเทศ วิศวกรรมโยธา การทำแผนที่ในเหมือง และการใช้งานในสภาพแวดล้อมที่ท้าทาย
คุณสมบัติที่โดดเด่น
- ระบบ Full Lifecycle Auto-Calibration ที่เครื่องสามารถจะ Cal ตัวเอง ไม่จำเป็นส่งกลับไปที่โรงงานเพื่อปรับเทียบ (ได้Precision ACC)
- ระบบ Agile Movements OmniSLAM™ ผู้ปฏิบัติงานจึงไม่จำเป็นต้องถืออุปกรณ์อย่างระมัดระวังและเคลื่อนไหวช้าๆ อีกต่อไป
- Point Cloud Thickness 2mm
- แสดงผลแบบเรียลไทม์ เพื่อลดการสแกนซ้ำ
- รองรับการแสดง, เก็บ, ส่งข้อมูล และประมวลผลบนโทรศัพท์มือถือ
- ตรวจสอบสถานะของอุปกรณ์แบบเรียลไทม์
Mobile SLAM Color 3D Laser Scanner-R8
Download Brochure
ดาวน์โหลด
OmniSLAM R8 ระบบ SLAM สำหรับงานสำรวจทำแผนที่ 3D ความละเอียดระดับ CM.
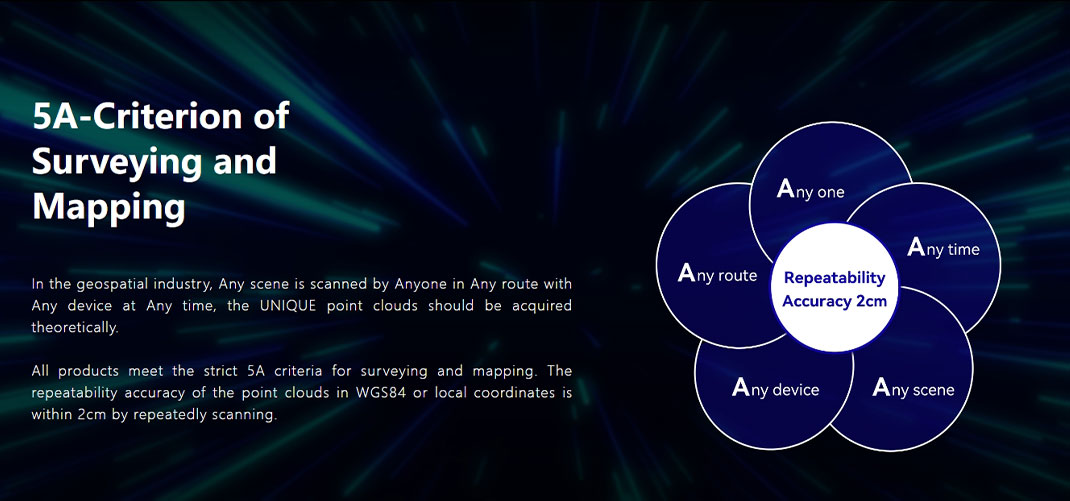
ผ่านเกณฑ์ 5A-Criterion ด้านการสำรวจและทำแผนที่ ในอุตสาหกรรมภูมิสารสนเทศ ทุกฉาก (Any scene) ที่ถูกสแกน โดย ใครก็ได้ (Anyone) ด้วย เส้นทางใดก็ได้ (Any route) ผ่าน อุปกรณ์ใดก็ได้ (Any device) และใน เวลาใดก็ได้ (Any time) ควรได้ผลลัพธ์ของ Point Clouds ที่ “เหมือนกัน” โดยทฤษฎี — สะท้อนถึงความแม่นยำและมาตรฐานระดับสูงของ R8
- • Relative Accuracy 1 CM.
- • Point Cloud Thickness 1 CM.
- • Absolute Accuracy Horizontal 1.8 cm / Vertical 2.5 cm.
- • Honrizontal / Vertical Accuracy Error 0.015°
- • Point Cloud Density 40,000pt/m²
- • Repeatability Accuracy 2cm
- • Measure Range 120m. / 130m.
- • Statellite Frequency -5ss / 16fre
OmniSLAM
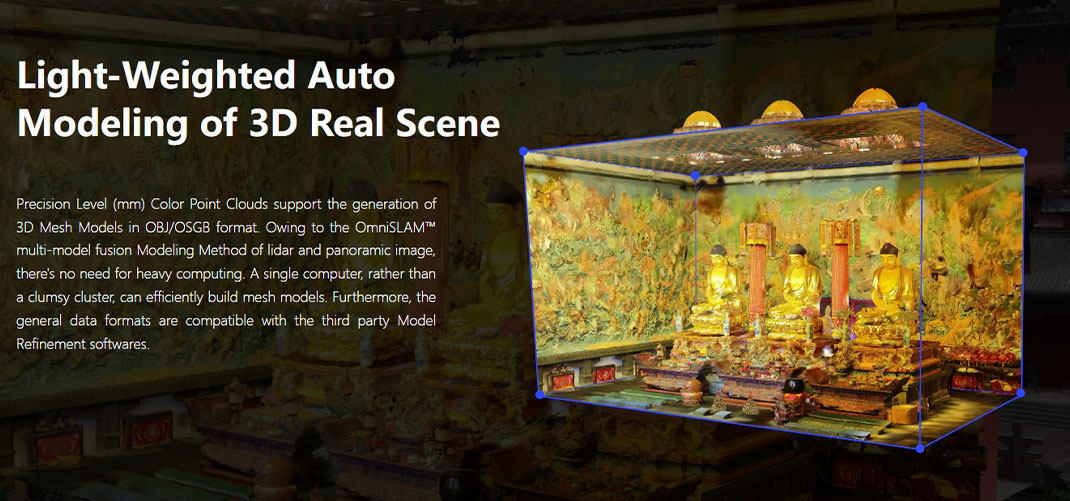
R8 | World-Realistic Color, Precision Level (cm)

R8 ผ่านเกณฑ์ 5A-Criterion ด้านการสำรวจและทำแผนที่
ในอุตสาหกรรมภูมิสารสนเทศ ทุกฉาก (Any scene) ที่ถูกสแกน โดย ใครก็ได้ (Anyone) ด้วย เส้นทางใดก็ได้ (Any route) ผ่าน อุปกรณ์ใดก็ได้ (Any device) และใน เวลาใดก็ได้ (Any time) ควรได้ผลลัพธ์ของ Point Clouds ที่ “เหมือนกัน” โดยทฤษฎี — สะท้อนถึงความแม่นยำและมาตรฐานระดับสูงของ R8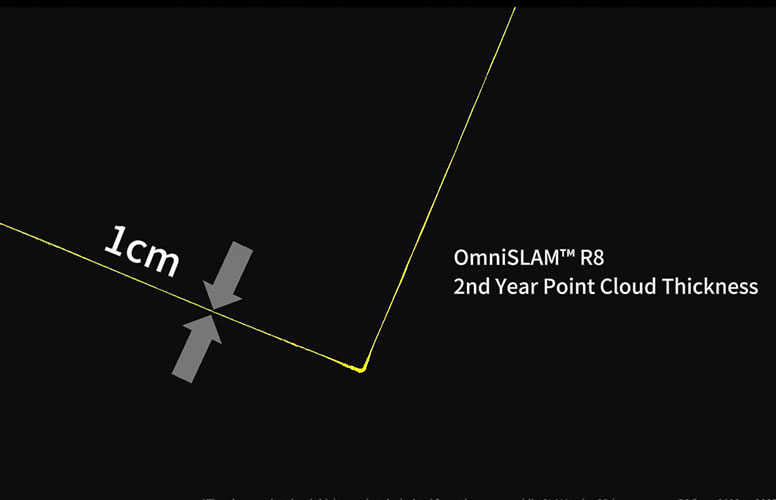
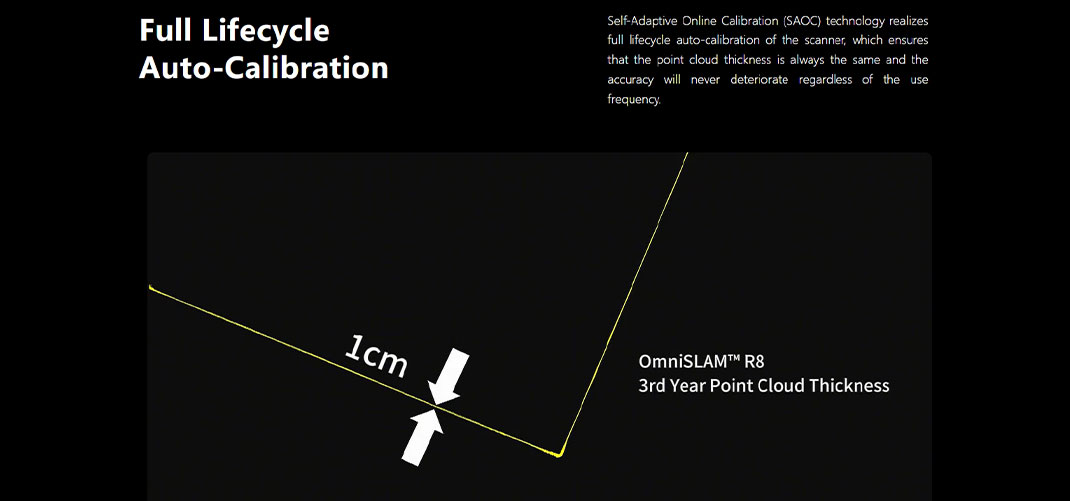
การปรับเทียบอัตโนมัติครอบคลุมตลอดอายุการใช้งาน
เทคโนโลยี Self-Adaptive Online Calibration (SAOC) ช่วยให้เครื่องสแกนสามารถปรับเทียบตัวเองได้โดยอัตโนมัติ ตลอดอายุการใช้งาน มั่นใจได้ว่า ความหนาของ Point Cloud จะคงที่ และ ความแม่นยำจะไม่เสื่อมลง ไม่ว่าจะใช้งานบ่อยเพียงใด ตั้งแต่วันแรกที่เริ่มใช้งาน ไม่จำเป็นต้องหยุดงาน หรือส่งกลับโรงงานเพื่อปรับเทียบอีกต่อไป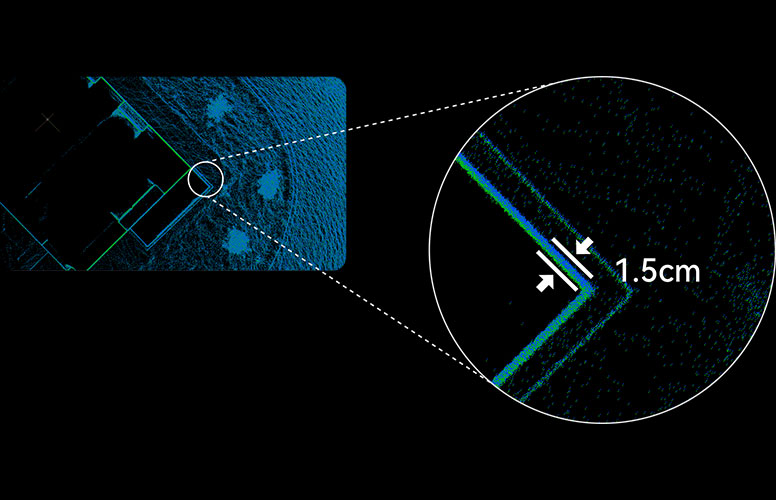
ความแม่นยำในการทำซ้ำ (Repeatability Accuracy)
R8 ผ่านเกณฑ์มาตรฐาน 5A-Criterion อันเข้มงวดสำหรับงานสำรวจและทำแผนที่ โดยในการสแกนซ้ำหลายครั้ง ความแม่นยำของข้อมูล Point Cloud ไม่ว่าจะอยู่ในระบบพิกัด WGS84 หรือพิกัดท้องถิ่น มีความคลาดเคลื่อนไม่เกิน 2 เซนติเมตร ซึ่งแสดงถึงเสถียรภาพและความน่าเชื่อถือของการสแกนในทุกสภาพแวดล้อม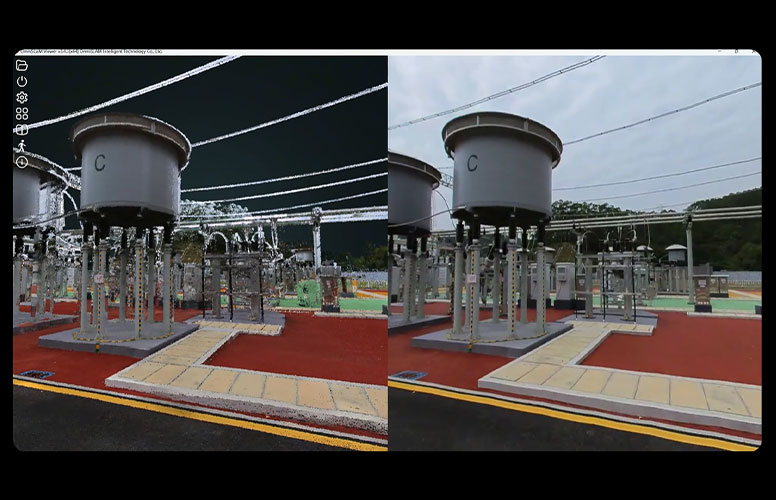
การเชื่อมโยงสองหน้าจอระหว่างภาพพาโนรามาและ Point Cloud สี
R8 มาพร้อมฟังก์ชัน แสดงผลแบบสองหน้าจอ ทั้ง ภาพพาโนรามา และ Point Cloud สี ช่วยให้ผู้ใช้งานสามารถ ดูรายละเอียดของฉากเดียวกัน ได้พร้อมกันทั้งจากมุมมองภาพจริงและข้อมูล 3 มิติ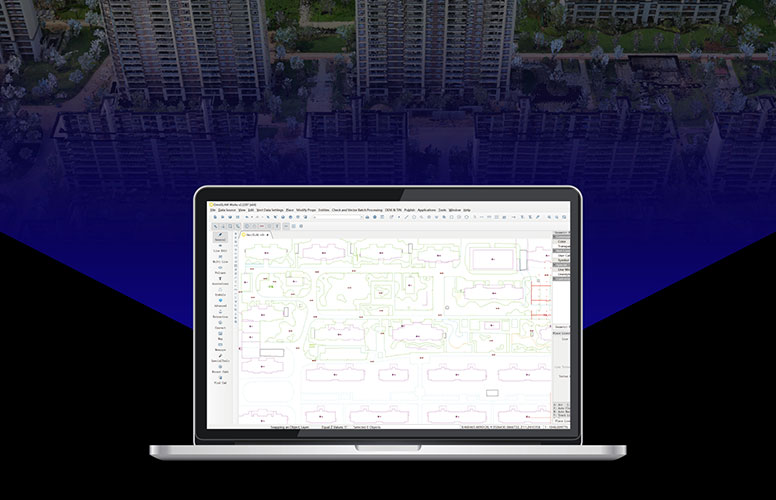
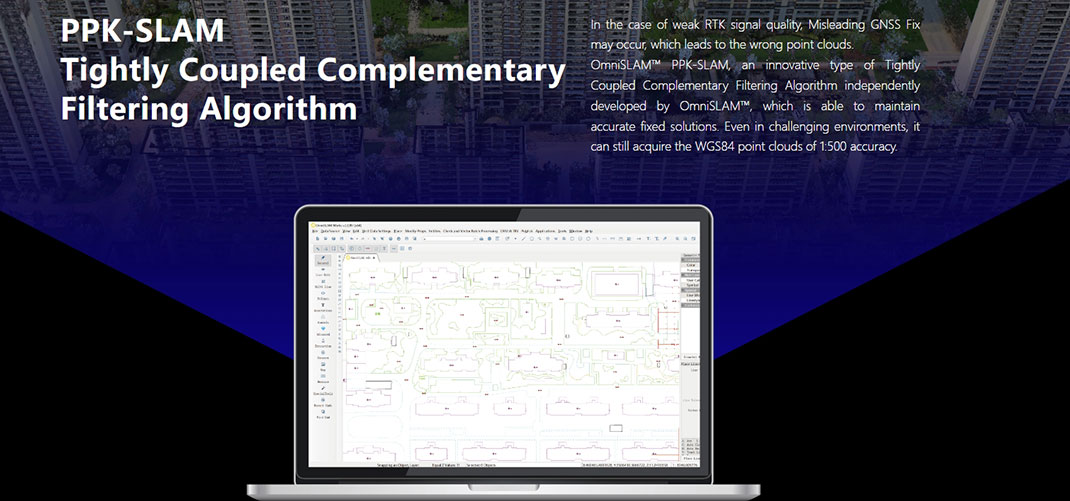
OmniSLAM™ PPK-SLAM
ในกรณีที่สัญญาณ RTK อ่อนหรือไม่เสถียร อาจเกิดการ Fix ตำแหน่งผิดพลาดจาก GNSS ซึ่งนำไปสู่ข้อมูล Point Cloud ที่คลาดเคลื่อนได้ OmniSLAM™ PPK-SLAM คืออัลกอริธึมที่พัฒนาโดย OmniSLAM™ โดยเฉพาะ ออกแบบมาเพื่อ รักษาความแม่นยำของตำแหน่ง Fix ได้แม้ในสภาพแวดล้อมที่ท้าทาย แม้จะอยู่ในพื้นที่ที่ GNSS มีข้อจำกัด ก็ยังสามารถสร้าง Point Cloud ระบบพิกัด WGS84 ที่มีความแม่นยำระดับ 1:500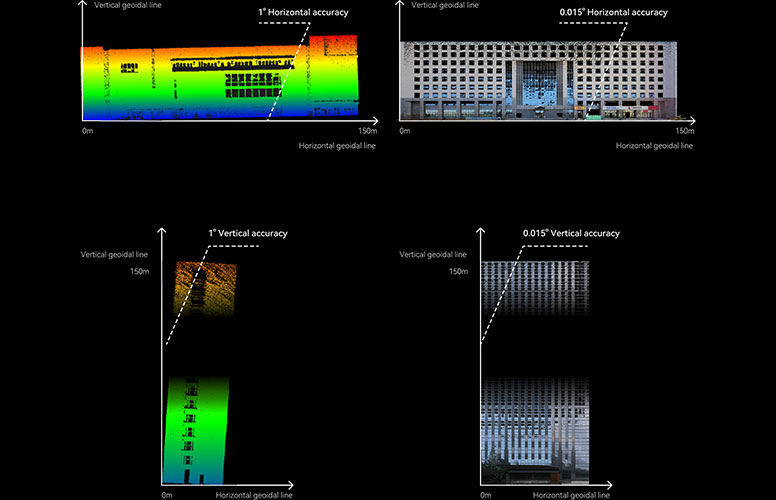
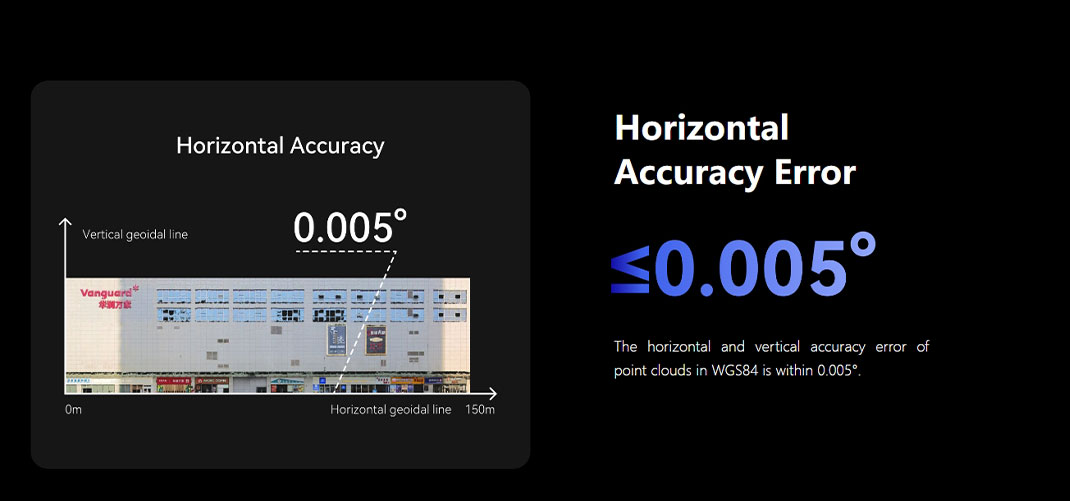
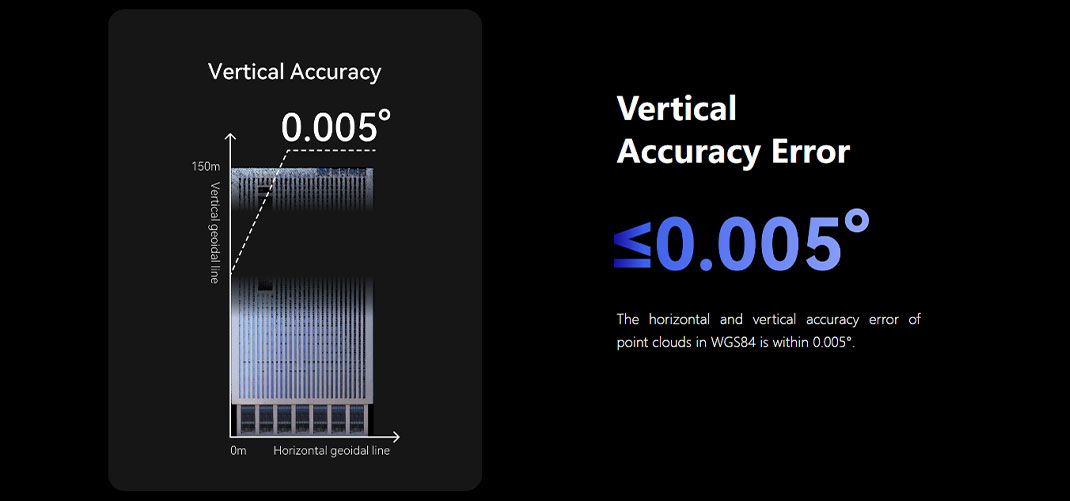
ความถูกต้องในแนวราบและแนวดิ่งของ Point Cloud
Mobile SLAM Color 3D Laser Scanner สามารถสร้าง Point Cloud สีแบบ 3 มิติในระบบพิกัด WGS84 ที่มีค่าพิกัดแนวราบ (Horizontal) และแนวดิ่ง (Vertical) แบบสัมบูรณ์ โดยมีค่าความคลาดเคลื่อนของมุมในแนวราบและแนวดิ่ง ไม่เกิน 0.015°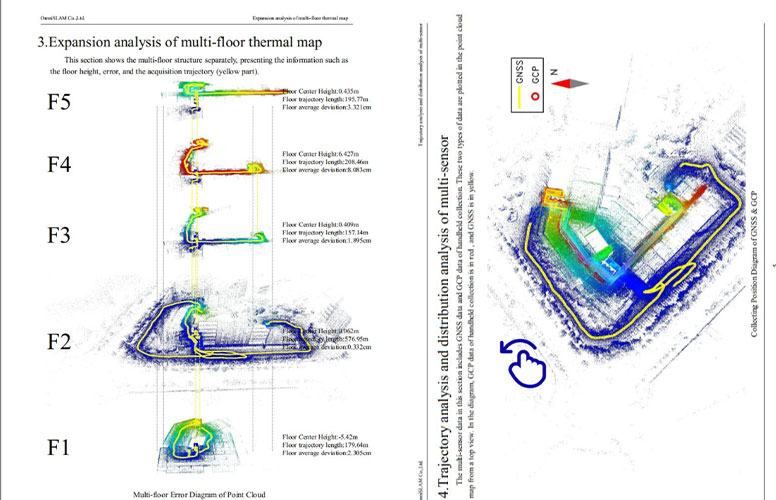
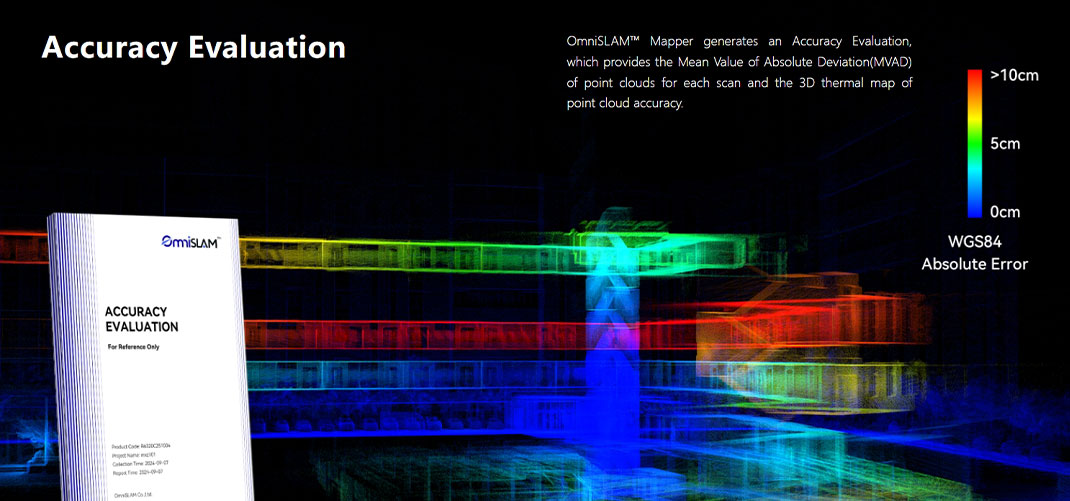
การประเมินความแม่นยำ (Accuracy Evaluation)
OmniSLAM™ Mapper มาพร้อมระบบ ประเมินความแม่นยำของข้อมูลสแกน โดยจะแสดงค่าเฉลี่ยของความคลาดเคลื่อนสัมบูรณ์ (Mean Value of Absolute Deviation - MVAD) สำหรับแต่ละการสแกน รวมถึงแสดง แผนที่ความร้อนแบบ 3 มิติ (3D Thermal Map) เพื่อแสดงระดับความแม่นยำของ Point Cloud ในแต่ละพื้นที่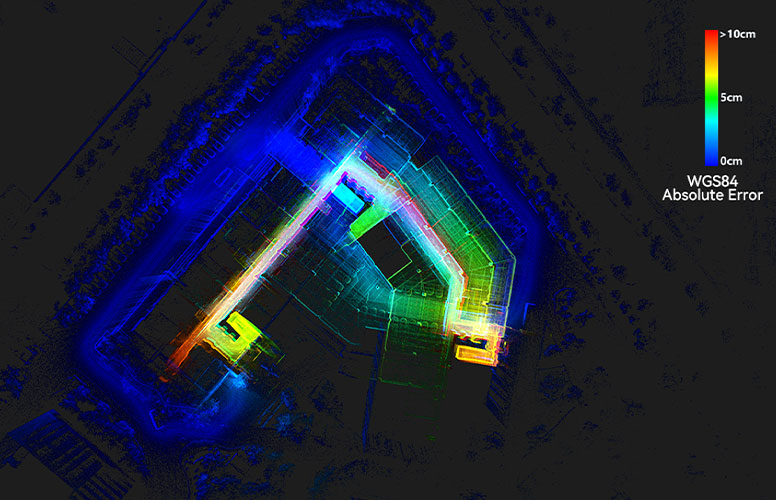
แผนที่ความร้อนแสดงความแม่นยำของ Point Cloud
ระบบแสดงผลแบบ “แผนที่ความร้อนหลายมุมมอง (Multi-view Thermal Map)” โดยใช้สีที่แตกต่างกันเพื่อแสดงระดับความแม่นยำที่ต่างกันของ Point Cloud ช่วยให้สามารถมองเห็น ตำแหน่งของข้อมูลที่แม่นยำได้อย่างชัดเจน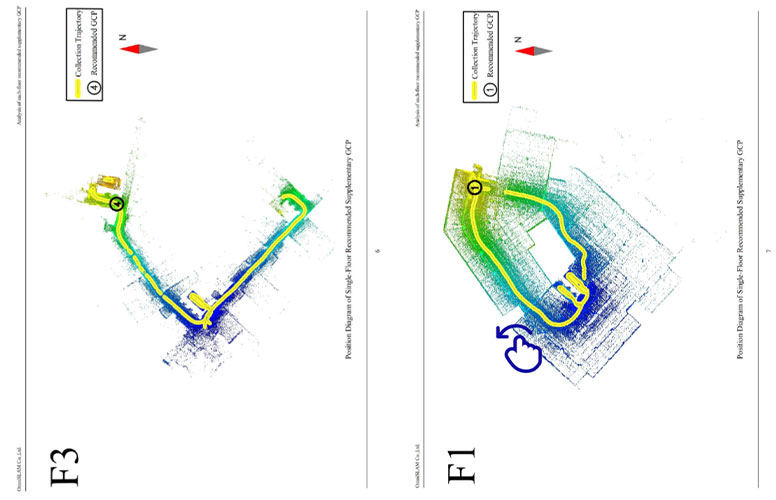
คำแนะนำในการแทรก GCP (GCP Inserting Instruction)
Mobile SLAM Color 3D Laser Scanner ของ OmniSLAM™ มาพร้อมฟังก์ชันสร้าง คำแนะนำในการแทรกจุดควบคุมภาคพื้นดิน (GCP) สำหรับการสแกนที่ได้ Point Cloud ซึ่งมีความแม่นยำไม่เป็นที่น่าพอใจ ระบบจะเสนอคำแนะนำเกี่ยวกับ จำนวนและตำแหน่งของ GCP ที่ควรเพิ่ม เพื่อช่วยให้การปรับปรุงข้อมูลมีประสิทธิภาพยิ่งขึ้น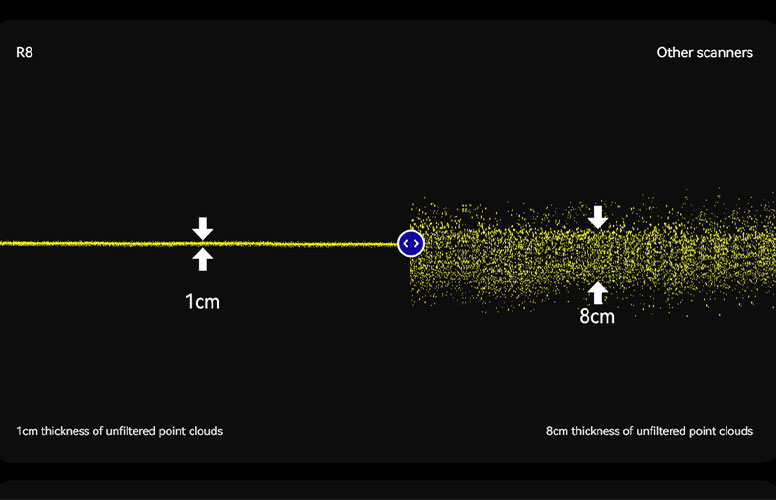
R8 ให้ความหนา Point Cloud ละเอียด 1 ซม.
R8 สามารถสร้างความหนาของ Point Cloud ที่ยังไม่ผ่านการกรองได้ที่ระดับ 1 เซนติเมตร พร้อมให้ขอบเขตที่คมชัดและข้อความที่ชัดเจนกรอกแบบฟอร์มขอใบเสนอราคา
หรือโทรปรึกษาเราได้ฟรี ไม่มีค่าใช้จ่าย โทร. 084-682-1041 (ฝ่ายขาย)
ขอใบเสนอราคา